Model C - Untact service
How to operate
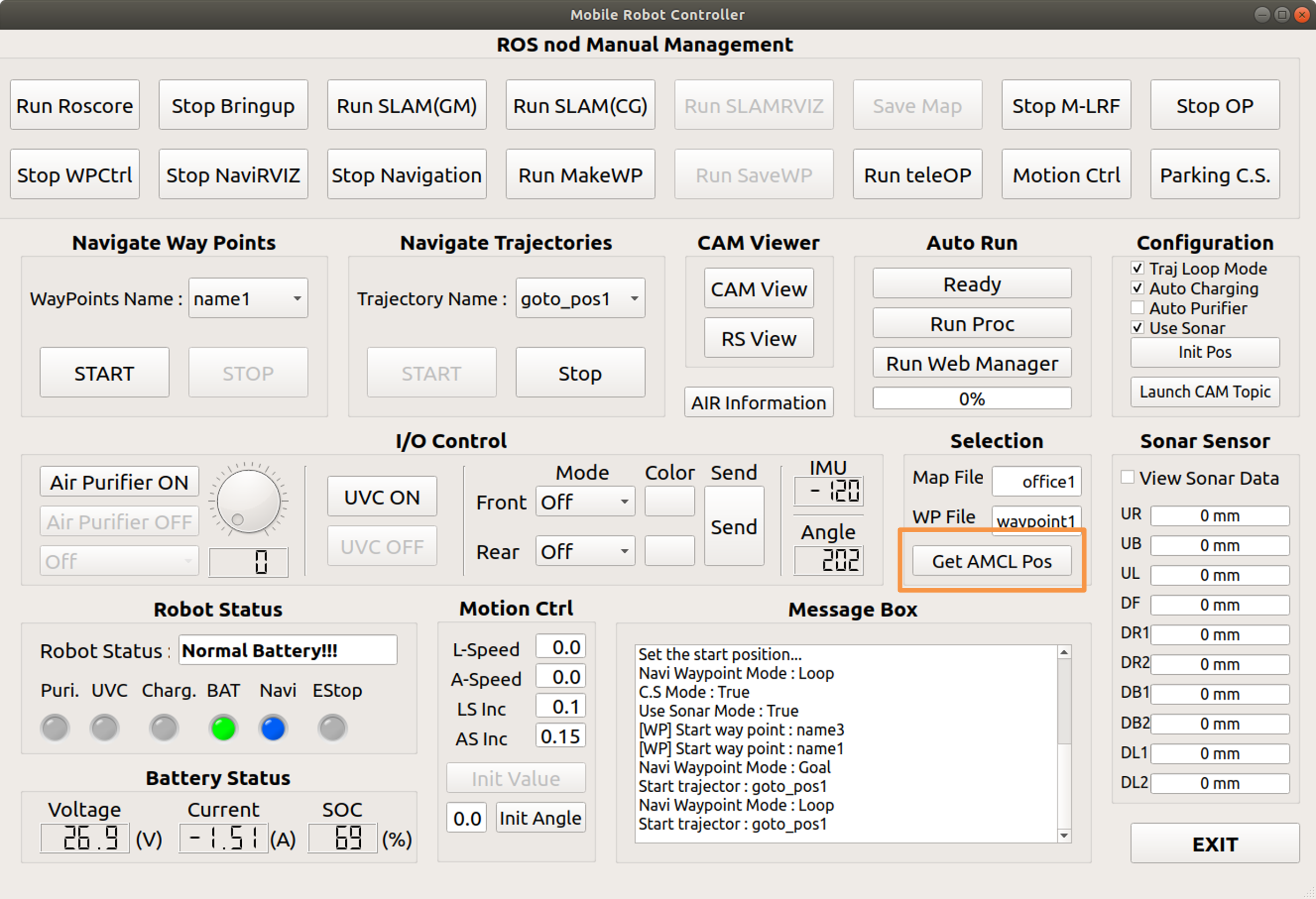
Outputs a window to get the robot’s current coordinates
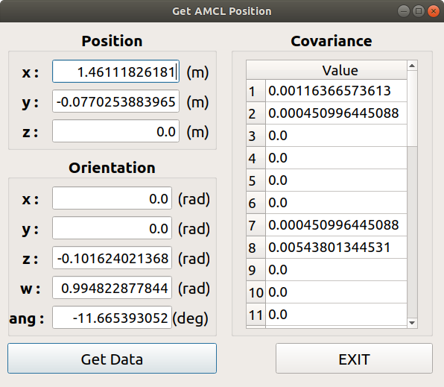
GUI execution screen when button is clicked